新建一个非常简单的 info.txt 文件。
1
2
3
4
5
| [root@linux0.11]$ cat > info.txt <<EOF
name:flash
age:28
language:java
EOF
|
在命令行输入一条十分简单的命令。
1
2
| [root@linux0.11]$ cat info.txt | wc -l
3
|
这条命令的意思是读取刚刚的 info.txt 文件,输出它的行数。
上一回中,我们讲述了读硬盘数据的全流程。
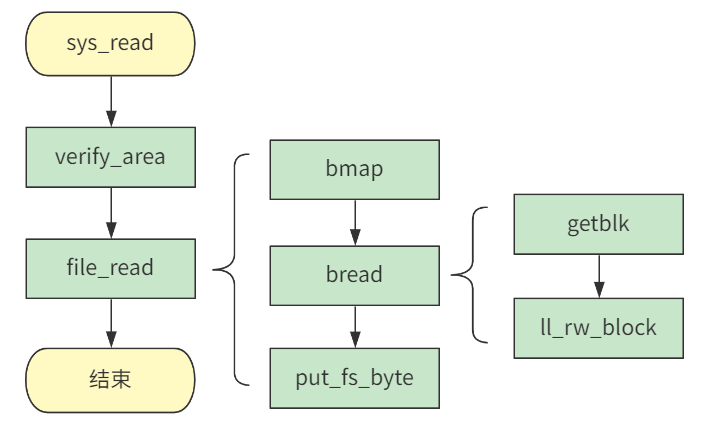
其中 ll_rw_block() 方法负责把硬盘中指定数据块中的数据,复制到 getblk()方法申请到的缓冲块里,上一回没有展开详细讲解。
所以我们这一回,就详细讲讲,ll_rw_block() 是如何完成这一任务的。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
| // buffer.c
struct buffer_head * bread(int dev,int block) {
...
ll_rw_block(READ,bh);
...
}
void ll_rw_block (int rw, struct buffer_head *bh) {
...
make_request(major, rw, bh);
}
struct request request[NR_REQUEST] = {0};
static void make_request(int major,int rw, struct buffer_head * bh) {
struct request *req;
...
// 从 request 队列找到一个空位
if (rw == READ)
req = request+NR_REQUEST;
else
req = request+((NR_REQUEST*2)/3);
while (--req >= request)
if (req->dev<0)
break;
...
// 构造 request 结构
req->dev = bh->b_dev;
req->cmd = rw;
req->errors=0;
req->sector = bh->b_blocknr<<1;
req->nr_sectors = 2;
req->buffer = bh->b_data;
req->waiting = NULL;
req->bh = bh;
req->next = NULL;
add_request(major+blk_dev,req);
}
// ll_rw_blk.c
static void add_request (struct blk_dev_struct *dev, struct request *req) {
struct request * tmp;
req->next = NULL;
cli(); // 清空 dirt 位
if (req->bh)
req->bh->b_dirt = 0;
// 当前请求项为空,那么立即执行当前请求项
if (!(tmp = dev->current_request)) {
dev->current_request = req;
sti();
(dev->request_fn)();
return;
}
// 插入到链表中
for ( ; tmp->next ; tmp=tmp->next)
if ((IN_ORDER(tmp,req) ||
!IN_ORDER(tmp,tmp->next)) &&
IN_ORDER(req,tmp->next))
break;
req->next=tmp->next;
tmp->next=req;
sti();
}
|
调用链很长,主线是从 request 数组中找到一个空位,然后作为链表项插入到 request 链表中。
没错 request 是一个 32 大小的数组,里面的每一个 request 结构间通过 next 指针相连又形成链表。
如果你熟悉 第15回 | 块设备请求项初始化 blk_dev_init 所讲的内容,就会明白这个说法咯。
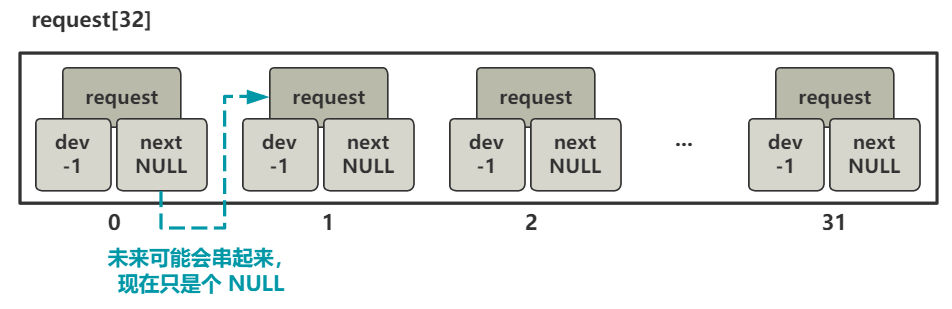
request 的具体结构是。
1
2
3
4
5
6
7
8
9
10
11
12
| // blk.h
struct request {
int dev; /* -1 if no request */
int cmd; /* READ or WRITE */
int errors;
unsigned long sector;
unsigned long nr_sectors;
char * buffer;
struct task_struct * waiting;
struct buffer_head * bh;
struct request * next;
};
|
表示一个读盘的请求参数。

有了这些参数,底层方法拿到这个结构之后,就知道怎么样访问硬盘了。
那是谁不断从这个 request 队列中取出 request 结构并对硬盘发起读请求操作的呢?
这里 Linux 0.11 有个很巧妙的设计,我们看看。
有没有注意到 add_request 方法有如下分支。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| // blk.h
struct blk_dev_struct {
void (*request_fn)(void);
struct request * current_request;
};
// ll_rw_blk.c
struct blk_dev_struct blk_dev[NR_BLK_DEV] = {
{ NULL, NULL }, /* no_dev */
{ NULL, NULL }, /* dev mem */
{ NULL, NULL }, /* dev fd */
{ NULL, NULL }, /* dev hd */
{ NULL, NULL }, /* dev ttyx */
{ NULL, NULL }, /* dev tty */
{ NULL, NULL } /* dev lp */
};
static void make_request(int major,int rw, struct buffer_head * bh) {
...
add_request(major+blk_dev,req);
}
static void add_request (struct blk_dev_struct *dev, struct request *req) {
...
// 当前请求项为空,那么立即执行当前请求项
if (!(tmp = dev->current_request)) {
...
(dev->request_fn)();
...
}
...
}
|
就是当设备的当前请求项为空,也就是第一次收到硬盘操作请求时,会立即执行该设备的 request_fn 方法,这便是整个读盘循环的最初推手。
当前设备的设备号是 3,也就是硬盘,会从 blk_dev 数组中取索引下标为 3 的设备结构。
在 第20回 | 硬盘初始化 hd_init 的时候,设备号为 3 的设备结构的 request_fn 被赋值为硬盘请求函数 do_hd_request 了。
1
2
3
4
5
| // hd.c
void hd_init(void) {
blk_dev[3].request_fn = do_hd_request;
...
}
|
所以,刚刚的 request_fn 背后的具体执行函数,就是这个 do_hd_request()。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| #define CURRENT (blk_dev[MAJOR_NR].current_request)
// hd.c
void do_hd_request(void) {
...
unsigned int dev = MINOR(CURRENT->dev);
unsigned int block = CURRENT->sector;
...
nsect = CURRENT->nr_sectors;
...
if (CURRENT->cmd == WRITE) {
hd_out(dev,nsect,sec,head,cyl,WIN_WRITE,&write_intr);
...
} else if (CURRENT->cmd == READ) {
hd_out(dev,nsect,sec,head,cyl,WIN_READ,&read_intr);
} else
panic("unknown hd-command");
}
|
我去掉了一大坨根据起始扇区号计算对应硬盘的磁头 head、柱面 cyl、扇区号 sec 等信息的代码。
可以看到最终会根据当前请求是写(WRITE)还是读(READ),在调用 hd_out 时传入不同的参数。
hd_out 就是读硬盘的最最最最底层的函数了。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| // hd.c
static void
hd_out(unsigned int drive,unsigned int nsect,unsigned int sect,
unsigned int head,unsigned int cyl,unsigned int cmd,
void (*intr_addr)(void)){
...
do_hd = intr_addr;
outb_p(hd_info[drive].ctl,HD_CMD);
port=HD_DATA;
outb_p(hd_info[drive].wpcom>>2,++port);
outb_p(nsect,++port);
outb_p(sect,++port);
outb_p(cyl,++port);
outb_p(cyl>>8,++port);
outb_p(0xA0|(drive<<4)|head,++port);
outb(cmd,++port);
}
|
可以看到,最底层的读盘请求,其实就是向一堆外设端口做读写操作。
这个函数实际上在 第17回 | 时间初始化 time_init 为了讲解与 CMOS 外设交互方式的时候讲过了,简单说硬盘的端口表是这样的。
| 端口 | 读 | 写 |
|---|
| 0x1F0 | 数据寄存器 | 数据寄存器 |
| 0x1F1 | 错误寄存器 | 特征寄存器 |
| 0x1F2 | 扇区计数寄存器 | 扇区计数寄存器 |
| 0x1F3 | 扇区号寄存器或 LBA 块地址 0~7 | 扇区号或 LBA 块地址 0~7 |
| 0x1F4 | 磁道数低 8 位或 LBA 块地址 8~15 | 磁道数低 8 位或 LBA 块地址 8~15 |
| 0x1F5 | 磁道数高 8 位或 LBA 块地址 16~23 | 磁道数高 8 位或 LBA 块地址 16~23 |
| 0x1F6 | 驱动器/磁头或 LBA 块地址 24~27 | 驱动器/磁头或 LBA 块地址 24~27 |
| 0x1F7 | 命令寄存器或状态寄存器 | 命令寄存器 |
读硬盘就是,往除了第一个以外的后面几个端口写数据,告诉要读硬盘的哪个扇区,读多少。
然后再从 0x1F0 端口一个字节一个字节的读数据。
这就完成了一次硬盘读操作。
当然,从 0x1F0 端口读出硬盘数据,是在硬盘读好数据并放在 0x1F0 后发起的硬盘中断,进而执行硬盘中断处理函数里进行的。
在 第20回 | 硬盘初始化 hd_init 的时候,将 hd_interrupt 设置为了硬盘中断处理函数,中断号是 0x2E,代码如下。
1
2
3
4
5
6
| // hd.c
void hd_init(void) {
...
set_intr_gate(0x2E,&hd_interrupt);
...
}
|
所以,在硬盘读完数据后,发起 0x2E 中断,便会进入到 hd_interrupt 方法里。
1
2
3
4
5
6
7
8
| // system_call.s
_hd_interrupt:
...
xchgl _do_hd,%edx
...
call *%edx
...
iret
|
这个方法主要是调用 do_hd 方法,这个方法是一个指针,就是高级语言里所谓的接口,读操作的时候,将会指向 read_intr 这个具体实现。
1
2
3
4
5
6
7
8
9
10
11
12
13
| // hd.c
void do_hd_request(void) {
...
} else if (CURRENT->cmd == READ) {
hd_out(dev,nsect,sec,head,cyl,WIN_READ,&read_intr);
}
...
}
static void hd_out(..., void (*intr_addr)(void)) {
...
do_hd = intr_addr;
...
}
|
看,一切都有千丝万缕的联系,是不是很精妙。
我们展开 read_intr 方法继续看。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| // hd.c
#define port_read(port,buf,nr)
\ __asm__("cld;rep;insw"::"d" (port),"D" (buf),"c" (nr):"cx","di")
static void read_intr(void) {
...
// 从数据端口读出数据到内存
port_read(HD_DATA,CURRENT->buffer,256);
CURRENT->errors = 0;
CURRENT->buffer += 512;
CURRENT->sector++;
// 还没有读完,则直接返回等待下次
if (--CURRENT->nr_sectors) {
do_hd = &read_intr;
return;
}
// 所有扇区都读完了
// 删除本次都请求项
end_request(1);
// 再次触发硬盘操作
do_hd_request();
}
|
这里使用了 port_read() 宏定义的方法,从端口 HD_DATA 中读 256 次数据,每次读一个字,总共就是 512 字节的数据。
如果没有读完发起读盘请求时所要求的字节数,那么直接返回,等待下次硬盘触发中断并执行到 read_intr 即可。
如果已经读完了,就调用 end_request() 方法将请求项清除掉,然后再次调用 do_hd_request() 方法循环往复。
那重点就在于,如何结束掉本次请求的 end_request 方法。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| // blk.h
#define CURRENT (blk_dev[MAJOR_NR].current_request)
extern inline void
end_request(int uptodate) {
DEVICE_OFF(CURRENT->dev);
if (CURRENT->bh) {
CURRENT->bh->b_uptodate = uptodate;
unlock_buffer(CURRENT->bh);
}
...
wake_up(&CURRENT->waiting);
wake_up(&wait_for_request);
CURRENT->dev = -1;
CURRENT = CURRENT->next;
}
|
两个 wake_up() 方法。
第一个唤醒了该请求项所对应的进程 &CURRENT->waiting,告诉这个进程我这个请求项的读盘操作处理完了,你继续执行吧。
另一个是唤醒了因为 request 队列满了没有将请求项插进来的进程 &wait_for_request。
随后,将当前设备的当前请求项 CURRENT,即 request 数组里的一个请求项 request 的 dev 置空,并将当前请求项指向链表中的下一个请求项。
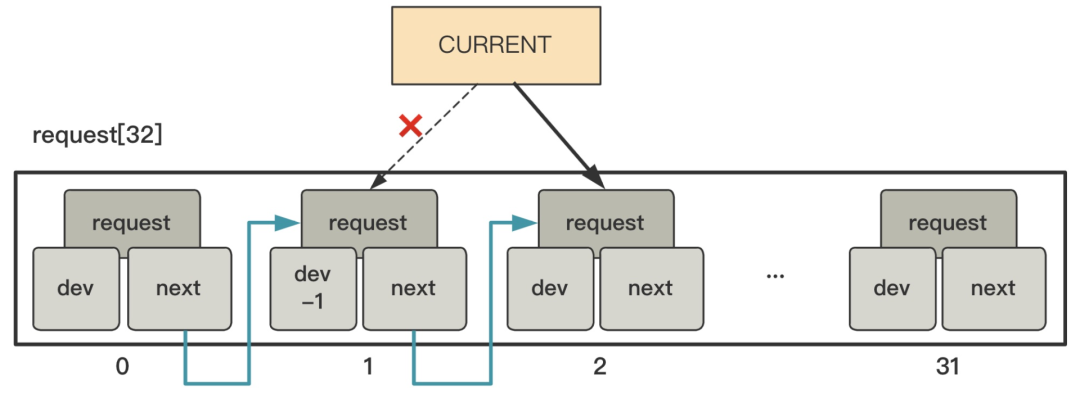
这样,do_hd_request 方法处理的就是下一个请求项的内容了,直到将所有请求项都处理完毕。
整个流程就这样形成了闭环,通过这样的机制,可以做到好似存在一个额外的进程,在不断处理 request 链表里的读写盘请求一样。
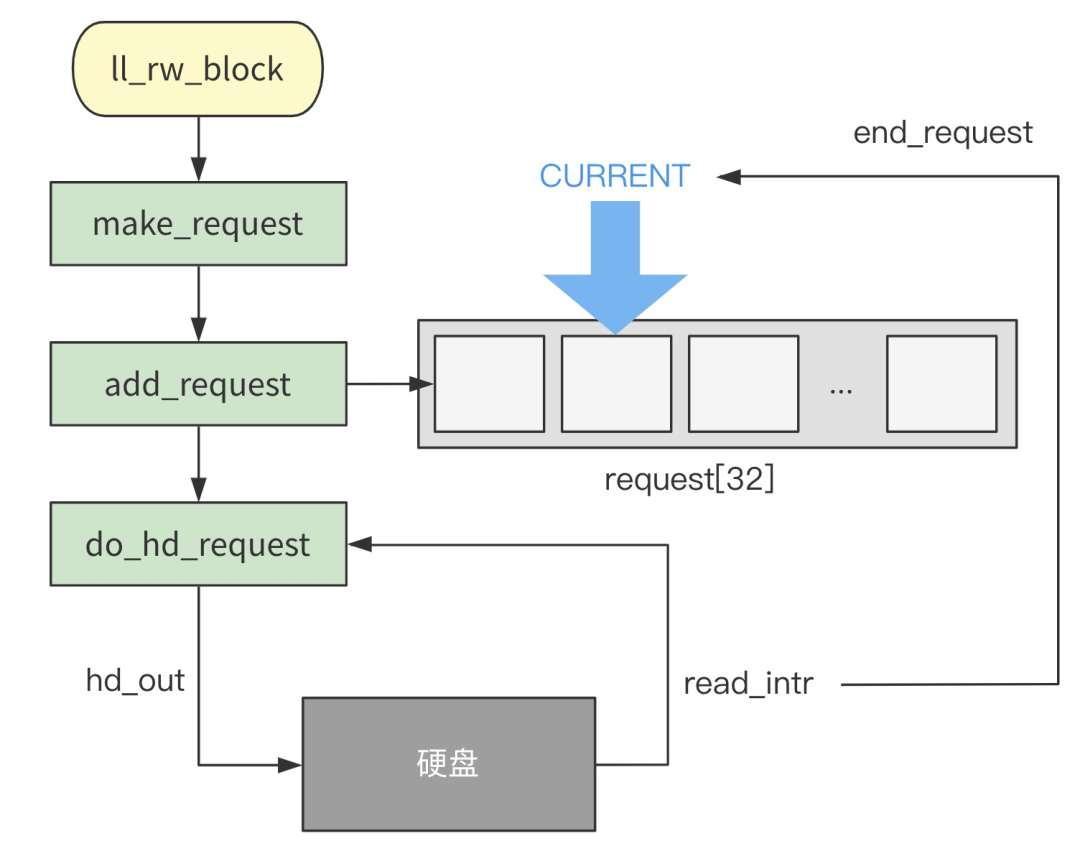
当设备的当前请求项为空时,也就是没有在执行的块设备请求项时,ll_rw_block 就会在执行到 add_request 方法时,直接执行 do_hd_request 方法发起读盘请求。
如果已经有在执行的请求项了,就插入 request 链表中。
do_hd_request 方法执行完毕后,硬盘发起读或写请求,执行完毕后会发起硬盘中断,进而调用 read_intr 中断处理函数。
read_intr 会改变当前请求项指针指向 request 链表的下一个请求项,并再次调用 do_hd_request 方法。
所以 do_hd_request 方法一旦调用,就会不断处理 request 链表中的一项一项的硬盘请求项,这个循环就形成了,是不是很精妙!
OK,通过上一回和这一回的讲解,读盘请求的全部细节终于讲解完毕了!你还好么?